Setup
- Start the VRG Tool service application
- Install the VRG OpenXR Runtime (see OpenXR page for details)
- alternatively you can also run XTAL through SteamVR driver and use SteamVR as OpenXR runtime instead of the custom VRG OpenXR runtime
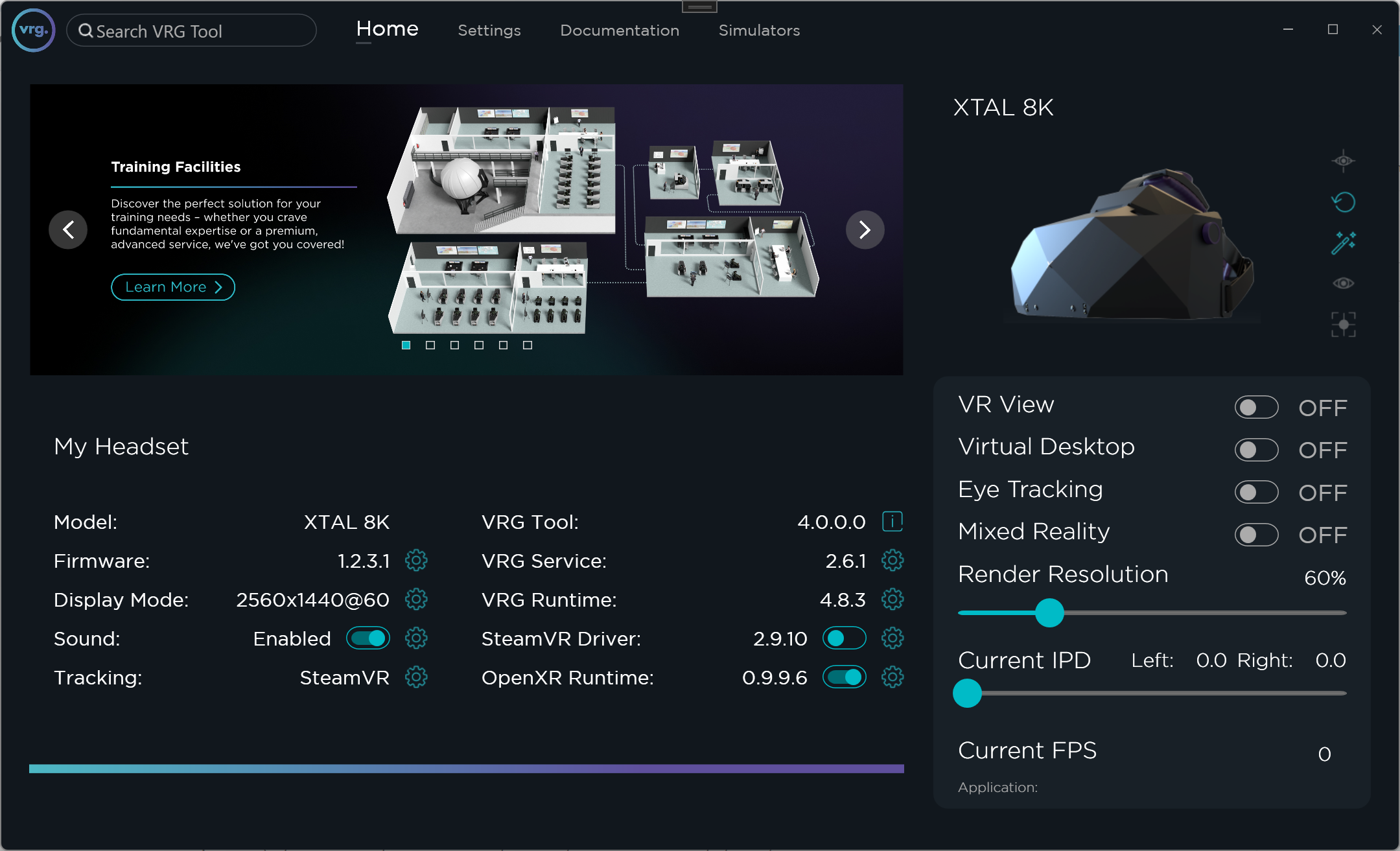
- Make sure that the VRG Runtime is installed and updated
- Make sure that the OpenXR Runtime is enabled
- We also recommend disabling the SteamVR Driver
- Make sure that you have the correct Tracking option selected
- use ‘IMU’ if you are using the XTAL internal IMU sensor without any additional room-scale tracking
- use ‘SteamVR’ if you are using the Lighthouse/SteamVR tracking system
- Optional (if you are using room-scale Lighthouse/SteamVR tracking system)
- Position the Lighthouse base stations around your tracking space, power them up, and make sure they are synchronized
- Start SteamVR

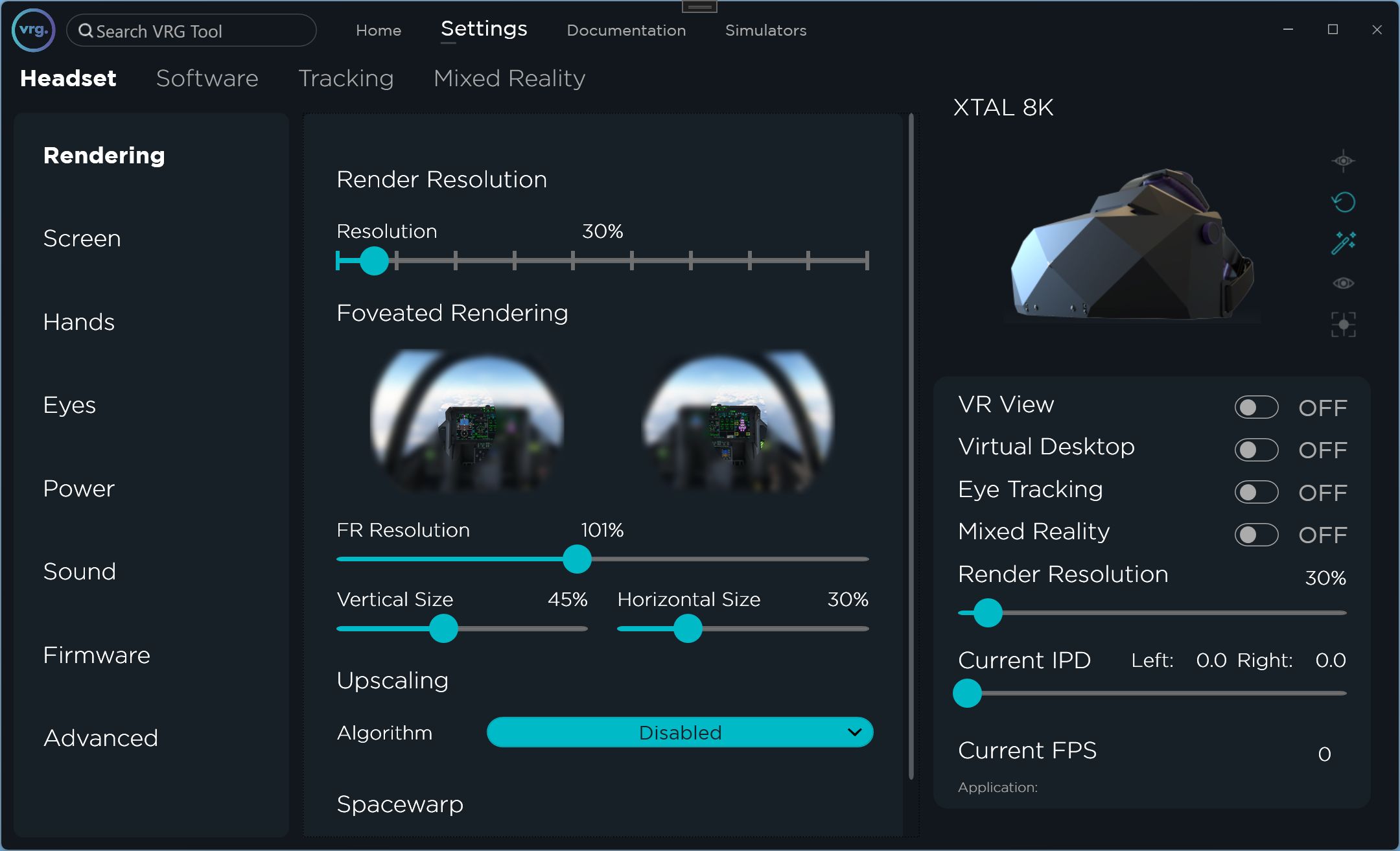
- Go to Settings – Headset Resolution
- Set the resolution to a value corresponding to the used GPU/CPU and your desired FPS
- we recommend setting the main resolution to 30% and foveated resolution to 100% (with 45% vertical size and 30% horizontal size)
- if you are using DCS through SteamVR, foveated rendering will not be available, so in that case we recommend setting the main resolution to 60%
- make sure to restart DCS after changing these settings
- you should test the resolution/FPS changes when the plane cockpit is loaded, as the main DCS menu will show overall higher FPS than what can be achieved in the full scenario
- we recommend setting the main resolution to 30% and foveated resolution to 100% (with 45% vertical size and 30% horizontal size)
- Set the resolution to a value corresponding to the used GPU/CPU and your desired FPS
- Start DCS Launcher
- Select VR Mode and press the Play button


This page was last modified on March 22nd, 2025 at 18:07
< PreviousNext >